Hemingroth
Genetically evolved perfect Tic-Tac-Toe player
Introduction
Tic-Tac-Toe, a simple yet engaging game, has entertained individuals for centuries [1]. Its origins can be traced back to ancient Egypt, with variations appearing across diverse cultures. Fundamentally, the game involves two players alternating turns, aiming to form a straight line of three of their respective symbols on a 3x3 grid. A key characteristic of Tic-Tac-Toe is its deterministic nature: with optimal play, neither player can guarantee a win, resulting in a draw. The limited number of possible game states renders it amenable to exhaustive analysis and the development of optimal strategies via computational algorithms. Genetic algorithms, inspired by biological evolution, have proven effective in solving complex optimization problems. These algorithms operate on a population of candidate solutions, iteratively improving them through processes analogous to natural selection. Given the discrete and constrained search space of Tic-Tac-Toe, a genetic algorithm is well-suited to evolve an optimal playing strategy, efficiently navigating the game's state space to identify a solution that avoids losing [2].
Search space
The total number of possible Tic-Tac-Toe board configurations is 3^9, accounting for each cell having three possible states (X, O, or blank). However, many of these configurations are invalid, as they represent states where a player has already won in a previous turn. Furthermore, due to the inherent symmetry of the 3x3 grid, each valid configuration has seven equivalent counterparts achievable through rotations and reflections. By identifying and eliminating invalid and symmetrical states, we can significantly reduce the search space [3].
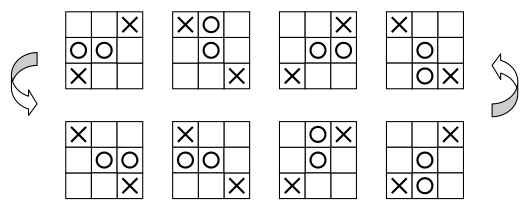
A recursive, exhaustive search was employed to generate all unique, valid game scenarios, revealing 627 such scenarios. This reduced search space represents the complete set of possible game states that the genetic algorithm will explore.
enum Cell {
O = -1,
Empty = 0,
X = 1,
}
type Scenario = Array<Cell>;
function variants(
s: Scenario,
): Map<Scenario, (s: Scenario) => Scenario> {
return new Map([
[identity(s), (s) => identity(s)],
[rotate(s), (s) => rotate(rotate(rotate(s)))],
[rotate(rotate(s)), (s) => rotate(rotate(s))],
[rotate(rotate(rotate(s))), (s) => rotate(s)],
[flip(s), (s) => flip(s)],
[rotate(flip(s)), (s) => flip(rotate(rotate(rotate(s))))],
[rotate(rotate(flip(s))), (s) => flip(rotate(rotate(s)))],
[rotate(rotate(rotate(flip(s)))), (s) => flip(rotate(s))],
]);
}
function base(s: Array<Scenario>): Scenario {
return s.sort()[0];
}
function toKey(s: Scenario): number {
return s.reduce((acc, v) => acc * 10 + (v + 2), 0);
}Training
Each candidate solution within the genetic algorithm's population is represented as an array of integers. The array's keys correspond to each unique game scenario identified in the search space. The values associated with each key are integers between 0 and 8, representing the cell to be played in that specific scenario. An initial population of *n* candidate solutions is generated, with array values randomly initialized. Each candidate solution's fitness is evaluated by playing it against every possible game variation. The scoring mechanism rewards solutions that result in wins or draws, while penalizing losses [3]. After evaluating the fitness of all candidate solutions, the most fit individuals are selected to form the next generation. These selected solutions undergo genetic operations: crossover, replication, and mutation. Crossover combines the genetic material of two parent solutions to create offspring; replication duplicates successful solutions; and mutation introduces random changes to individual solutions, promoting diversity. This iterative process continues until a candidate solution achieves a perfect fitness score of 1, indicating it has not lost a single game during its evaluation.
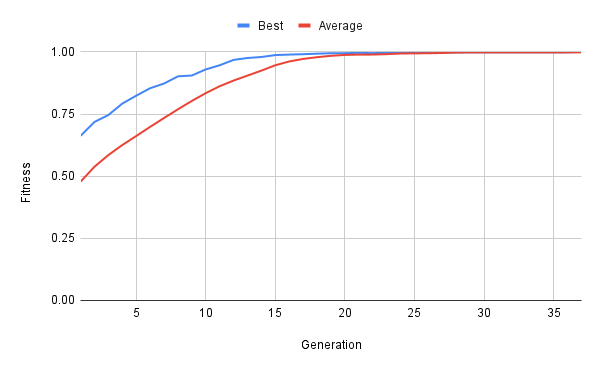
An optimal solution was found after 37 generations (~15 mins on a MacBook Air with Apple M2 chip and 8 GB memory) when running the training algorithm with the hyperparameters in Figure 3.
Population size = 2000 Sample size when picking genomes to populate next generation = 10 Probability of applying genetic operators: Mutation = 0.05 Replication = 0.05 Crossover = 0.1
time=18s,gen=1,best=0.66215,avg=0.47777 time=37s,gen=2,best=0.71820,avg=0.53799 time=56s,gen=3,best=0.74614,avg=0.58505 time=75s,gen=4,best=0.79210,avg=0.62535 time=94s,gen=5,best=0.82392,avg=0.66154 time=118s,gen=6,best=0.85389,avg=0.69851 time=137s,gen=7,best=0.87284,avg=0.73415 time=157s,gen=8,best=0.90171,avg=0.76912 time=180s,gen=9,best=0.90503,avg=0.80285 time=202s,gen=10,best=0.92964,avg=0.83417 time=227s,gen=11,best=0.94628,avg=0.86201 time=247s,gen=12,best=0.96790,avg=0.88482 time=268s,gen=13,best=0.97552,avg=0.90480 time=290s,gen=14,best=0.97959,avg=0.92482 time=313s,gen=15,best=0.98730,avg=0.94634 time=336s,gen=16,best=0.98924,avg=0.96162 time=359s,gen=17,best=0.99080,avg=0.97174 time=385s,gen=18,best=0.99293,avg=0.97880 time=406s,gen=19,best=0.99467,avg=0.98435 time=433s,gen=20,best=0.99481,avg=0.98791 time=456s,gen=21,best=0.99635,avg=0.98917 time=483s,gen=22,best=0.99500,avg=0.98938 time=507s,gen=23,best=0.99657,avg=0.99103 time=536s,gen=24,best=0.99830,avg=0.99351 time=560s,gen=25,best=0.99833,avg=0.99416 time=585s,gen=26,best=0.99834,avg=0.99466 time=613s,gen=27,best=0.99837,avg=0.99571 time=637s,gen=28,best=0.99838,avg=0.99749 time=665s,gen=29,best=0.99838,avg=0.99820 time=691s,gen=30,best=0.99839,avg=0.99828 time=720s,gen=31,best=0.99839,avg=0.99831 time=745s,gen=32,best=0.99839,avg=0.99831 time=775s,gen=33,best=0.99839,avg=0.99832 time=800s,gen=34,best=0.99839,avg=0.99837 time=828s,gen=35,best=0.99839,avg=0.99834 time=858s,gen=36,best=0.99841,avg=0.99839 time=884s,gen=37,best=1.00000,avg=0.99832
Conclusion
Genetic algorithms excel at solving optimization problems with large, complex search spaces, particularly those where the objective function is difficult to define or has multiple local optima. They are less effective for problems requiring precise analytical solutions or those with very small, well-defined search spaces. Their strength lies in their ability to explore and exploit the search space through an iterative, stochastic process, mimicking the evolutionary mechanisms of natural selection. The inspiration for genetic algorithms comes directly from the natural world, a domain that has historically provided a wealth of innovative ideas and solutions for human endeavors. The inherent robustness and adaptability of genetic algorithms, derived from evolutionary principles, make them a valuable tool for tackling a wide range of computational challenges, including the optimization of game-playing strategies as demonstrated in this project.